動作捕捉系統(tǒng)用于準(zhǔn)確測量運(yùn)動物體在三維空間中的運(yùn)動狀態(tài)與空間位置。ErgoLAB Motion是的全新可穿戴運(yùn)動捕捉與人機(jī)工效/生物力學(xué)分析系統(tǒng),配備可穿戴人因記錄儀,便于攜帶,非常適用于各種虛擬現(xiàn)實應(yīng)用與實時的現(xiàn)場人因工效科學(xué)研究,如安全生產(chǎn)、人機(jī)交互、運(yùn)動分析,動作姿勢傷害評估等。
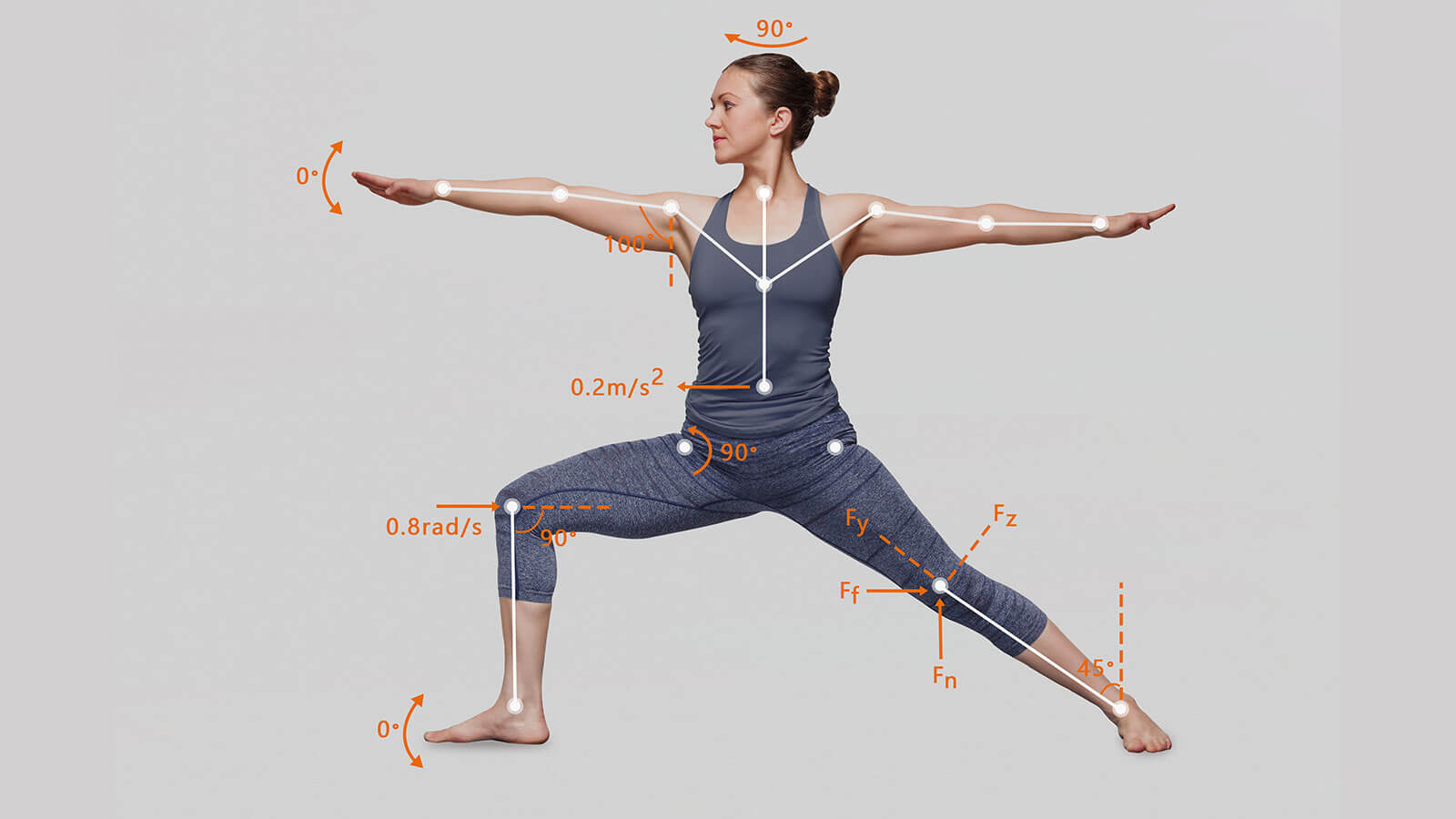
結(jié)合加速度、陀螺儀、方位傳感器實時采集人體動作,位置,速度,關(guān)節(jié)角度,扭矩等信息不受環(huán)境、光線與空間距離的限制,配備無線人因記錄儀便于攜帶,適合真實戶外現(xiàn)場研究抗電磁干擾能力、支持多人同時進(jìn)行且數(shù)據(jù)穩(wěn)定性的慣性IMU技術(shù)同時追蹤操作人員的位置、距離和步數(shù),無需額外標(biāo)記即實現(xiàn)較為精準(zhǔn)的空間定位效果工效分析與姿勢傷害評估:通過3D數(shù)字人實現(xiàn)對動作和姿勢的實時風(fēng)險評估與預(yù)警支持實時同步采集多模態(tài)數(shù)據(jù),包括眼動、腦電、生理、行為等,支持3D空間位置計算數(shù)據(jù)采集與可視化分析
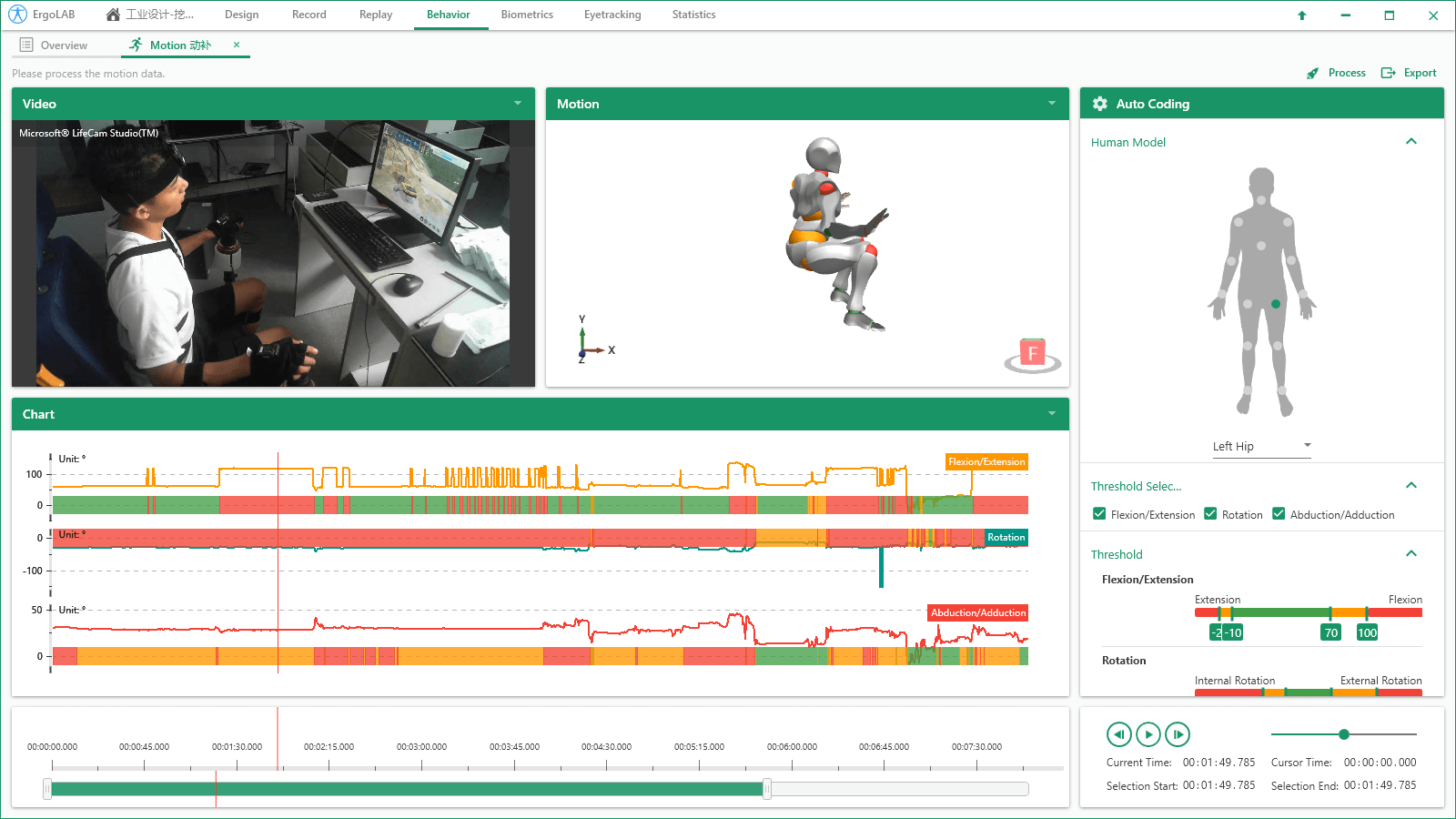
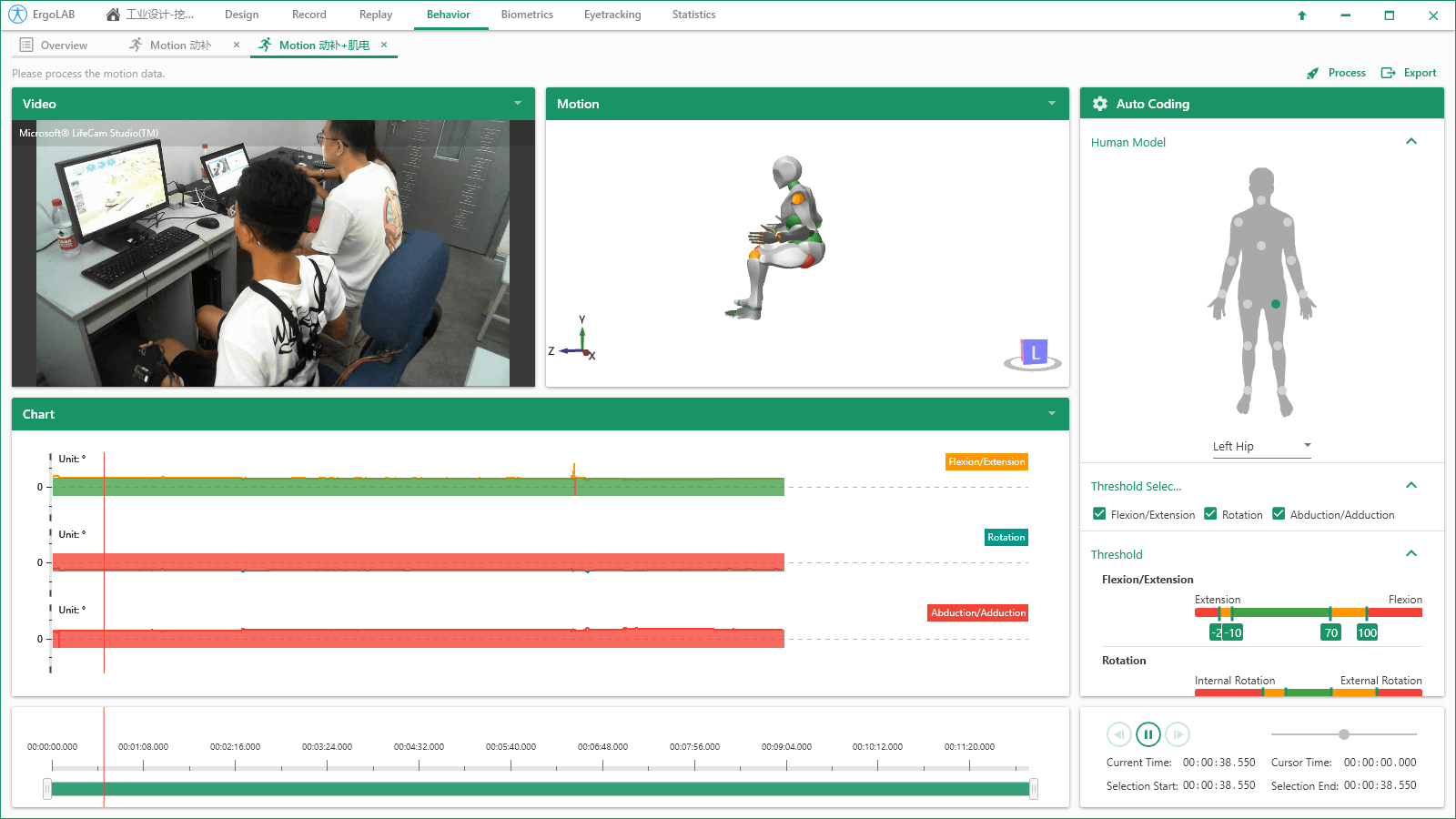
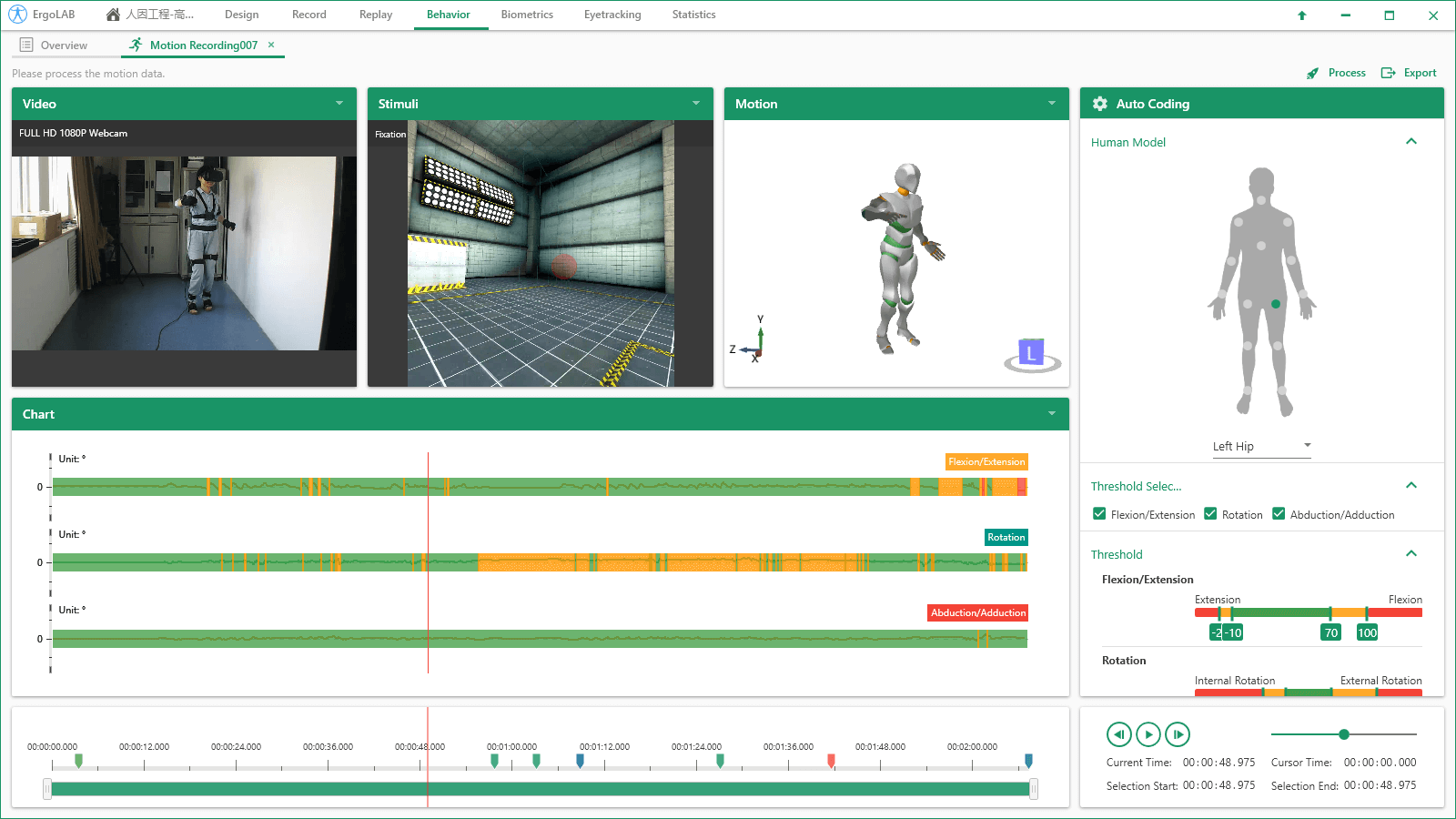
多種數(shù)據(jù)采集與編碼方式:支持實時數(shù)據(jù)傳輸以及Motion Datalog便攜式數(shù)據(jù)采集儀采集,數(shù)據(jù)可后期導(dǎo)入系統(tǒng)中,與其他多元數(shù)據(jù)同步分析。支持實時姿態(tài)編碼與后期手動編碼。自定義處理參數(shù):可以自定義設(shè)置身高數(shù)據(jù),并包含完整的參數(shù)處理模塊,如數(shù)據(jù)降噪、合并最短行為、自定義行為長度等,幫助用戶可以找到目標(biāo)動作與動作分類。可視化3D人體模型:通過動作捕捉傳感器IMU中的加速度、磁力計、陀螺儀數(shù)據(jù),計算人體動作,位置,速度,關(guān)節(jié)角度,扭矩等信息,精確重塑個體的3D人體動作模型,實時或離線觀察個體的運(yùn)動姿態(tài)以及不同關(guān)節(jié)的運(yùn)動情況。可視化數(shù)據(jù)編碼:系統(tǒng)默認(rèn)14個關(guān)節(jié)角度的安全度閾值范圍,并自動識別并編碼個體在動態(tài)作業(yè)過程中的實時關(guān)節(jié)角度數(shù)據(jù),并進(jìn)入行為數(shù)據(jù)統(tǒng)計分析。動作行為數(shù)據(jù)交互分析
基礎(chǔ)行為分析:計算統(tǒng)計每種動作行為狀態(tài)發(fā)生的開始時間、結(jié)束時間、行為發(fā)生的持續(xù)時間、發(fā)生的次數(shù)、整個實驗任務(wù)中的操作安全程度比例等數(shù)據(jù)統(tǒng)計。交互行為分析:自動識別兩種或多種動作發(fā)生的交互關(guān)系,針對兩種或多種行為同時發(fā)生的時間、次數(shù)、概率等數(shù)據(jù)指標(biāo)進(jìn)行統(tǒng)計。行為順序效應(yīng)分析:自動可視化分析一種動作發(fā)生在另一種動作之后/之前的動態(tài)關(guān)系,包括動作之間的延遲效應(yīng)、順序效應(yīng)分析,并一鍵導(dǎo)出行為發(fā)生的可視化序列性分析報告。動作姿勢傷害評估
通過3D人體數(shù)據(jù)模型,實時監(jiān)測14個關(guān)節(jié)位置分別對應(yīng)的Flexion / Extension彎曲/伸展; Abduction / Adduction外展/內(nèi)收;Rotation旋轉(zhuǎn)以及 Angular Velocity角速度與 Angular Acceleration角加速度等,可實現(xiàn)對被試動作和姿勢的實時視覺反饋以及風(fēng)險姿勢預(yù)警。依據(jù)職業(yè)工效學(xué)理論數(shù)據(jù)庫常模,將人體姿態(tài)的各個關(guān)節(jié)角度閾值劃分為健康(綠色)、警戒(紅色)和中等(橘色)狀態(tài)。系統(tǒng)可以自動化評估作業(yè)中影響工作效率的因素或可能造成職業(yè)傷害的動作。多維度數(shù)據(jù)統(tǒng)計與二次開發(fā)
多維度數(shù)據(jù)交叉統(tǒng)計:系統(tǒng)支持動作捕捉數(shù)據(jù)與其他多模態(tài)數(shù)據(jù)(眼動、腦電、生理、行為、面部表情等)的同步交叉分析,多個數(shù)據(jù)源在同一平臺界面呈現(xiàn),在采集的同時間軸數(shù)據(jù)里選擇相應(yīng)的時間片段,可同步觀察和統(tǒng)計分析所有數(shù)據(jù)流之間的相關(guān)關(guān)系。具有API開發(fā)接口:動作捕捉原始數(shù)據(jù)可以被其他程序?qū)崟r訪問,可使其它程序?qū)Ρ辉囌叩母鱾€關(guān)節(jié)9軸姿態(tài)進(jìn)行計算與加工。ErgoLAB人機(jī)環(huán)境同步云平臺可人-機(jī)-環(huán)境多維度數(shù)據(jù)的同步采集與綜合分析,包括眼動追蹤、生理測量、生物力學(xué)、腦電、腦成像、行為、人機(jī)交互、動作姿態(tài)、面部表情、主觀評 價、時空行為、模擬器、物理環(huán)境等,為科學(xué)研究及應(yīng)用提供完整的數(shù)據(jù)指標(biāo)。平臺可完成完整的實驗和測評流程,包括項目管理-試驗設(shè)計-同步采集-信號處理-數(shù)據(jù)分析-人工智能應(yīng)用-可視化報告,支持基于云架構(gòu)技術(shù)的團(tuán)體測試和大數(shù)據(jù)云管理。
 機(jī)床商務(wù)網(wǎng)
機(jī)床商務(wù)網(wǎng)











 機(jī)床商務(wù)網(wǎng)
機(jī)床商務(wù)網(wǎng)