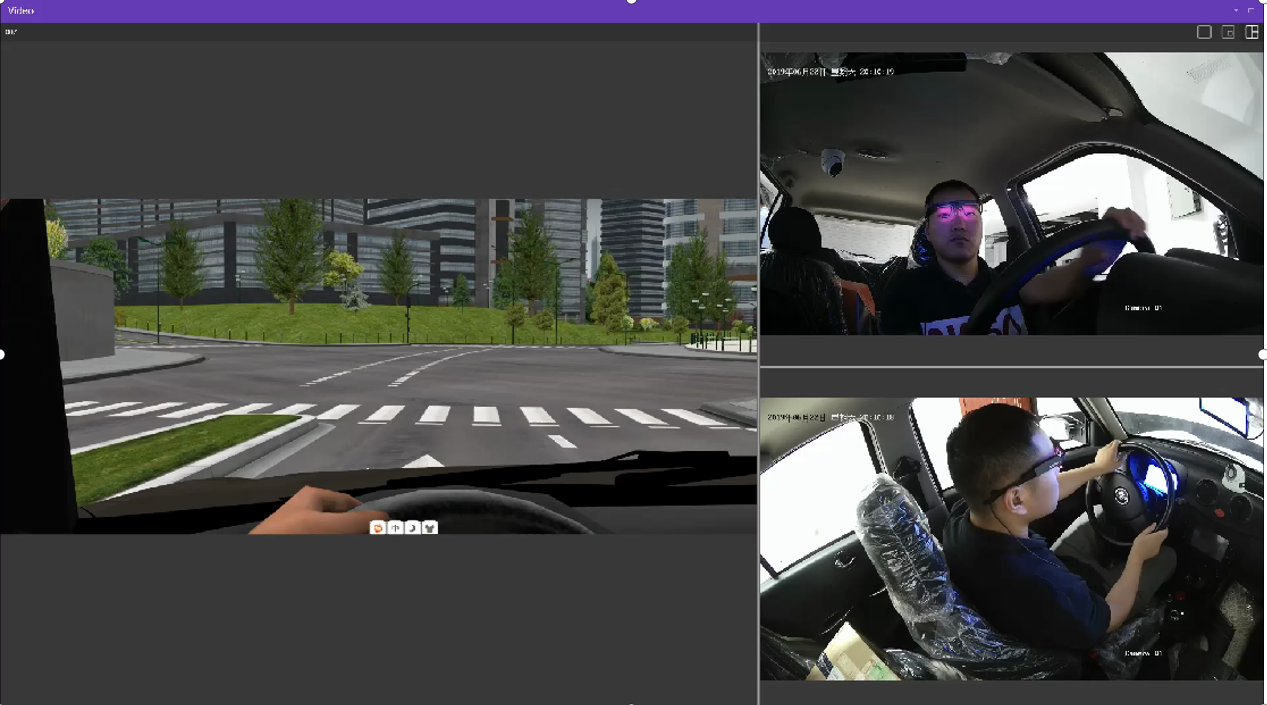
ErgoLAB人車路環(huán)境測試云平臺是基于云架構(gòu)的專業(yè)用于“以人為中心”的多模態(tài)數(shù)據(jù)同步采集和定量化分析平臺,專注于駕駛心理行為研究、車輛行駛狀態(tài)分析、交通道路環(huán)境數(shù)據(jù)采集以及自動駕駛與模擬仿真駕駛等研究內(nèi)容。系統(tǒng)提供駕駛模擬仿真和實車測試兩種解決方案,可實現(xiàn)在特定的駕駛模擬仿真環(huán)境以及各種復(fù)雜自然的條件下對人-車-路-環(huán)境數(shù)據(jù)的采集與分析。實現(xiàn)人車路交互同步數(shù)據(jù)可視化,客觀定量化分析人-車-路-環(huán)境的交互影響機理及其內(nèi)在因果關(guān)系,有助于提升廣度橫向研究與深度縱向研究。
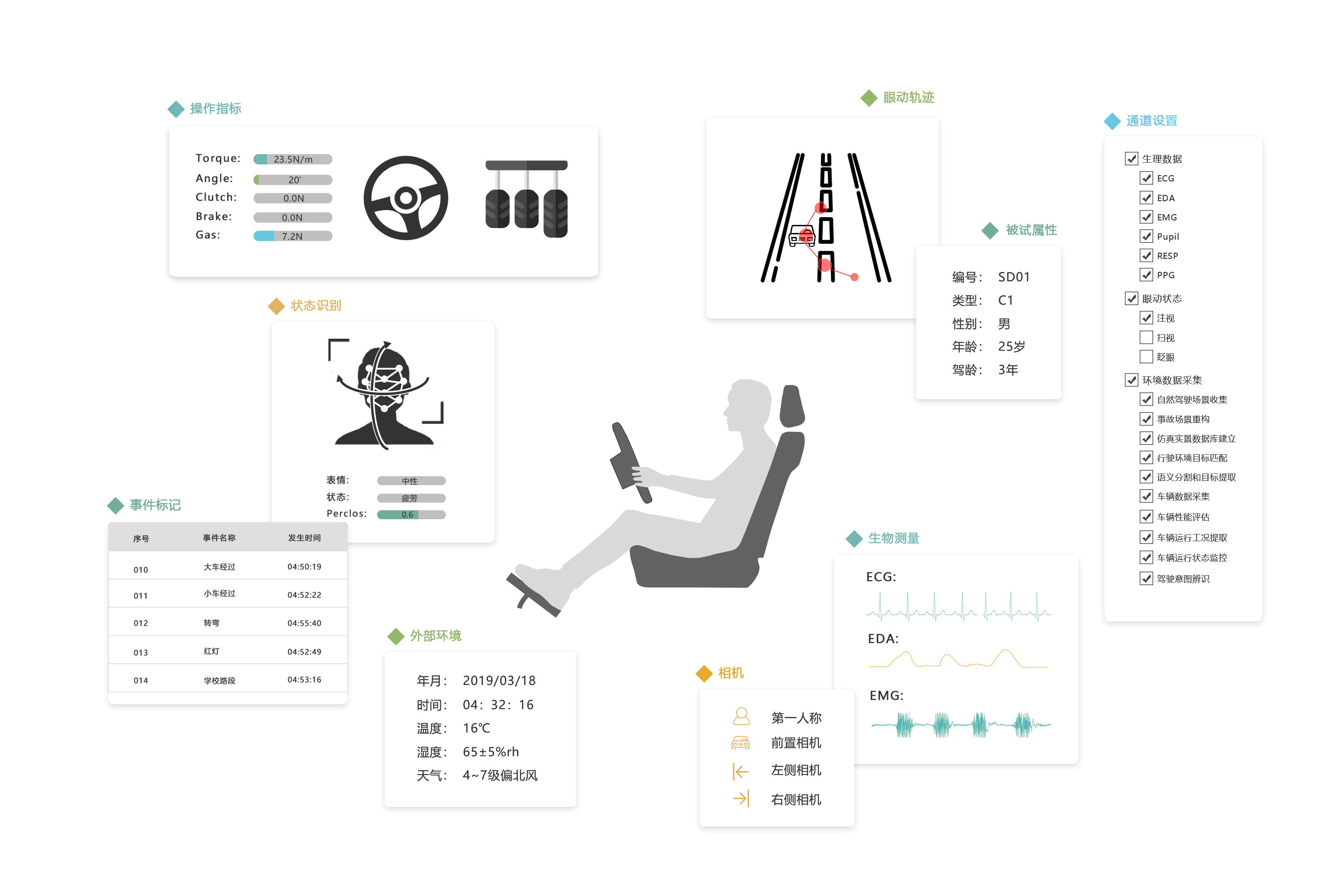
 滿足各種研究環(huán)境:一是真實駕駛環(huán)境研究,系統(tǒng)提供改裝車輛及外部交通數(shù)據(jù)采集設(shè)備,實現(xiàn)真正的“人-車-路”數(shù)據(jù)協(xié)同;二是系統(tǒng)支持駕駛模擬環(huán)境下的駕駛?cè)艘驕y試,提供駕駛模擬方案,包括模擬駕駛艙、視景投影和交通場景與物理照明仿真,實現(xiàn)“駕駛模擬”一站式解決方案。 完整的云項目管理及研究流程:系統(tǒng)包含云項目管理、云實驗設(shè)計、同步記錄、數(shù)據(jù)回放、信號處理與統(tǒng)計分析,涵蓋整個研究流程,滿足各種課題項目。 科學(xué)的信號處理與數(shù)據(jù)統(tǒng)計:包含車輛分析、駕駛?cè)藸顟B(tài)識別、時空分析、生理分析、眼動分析、行為分析等,輸出完整的數(shù)據(jù)統(tǒng)計與可視化報告。多模態(tài)數(shù)據(jù)同步采集與分析:支持實時同步與事后同步,包含車輛數(shù)據(jù)、道路與環(huán)境數(shù)據(jù)、生理、眼動、腦電、動作捕捉、行為觀察與面部表情等數(shù)據(jù)。開放式設(shè)備接口與數(shù)據(jù)兼容:系統(tǒng)通過SDK/API/TTL等廣泛的數(shù)據(jù)接口進行第三方設(shè)備或者數(shù)據(jù)同步,同時可以直接導(dǎo)入外部數(shù)據(jù),與系統(tǒng)內(nèi)數(shù)據(jù)進行同步分析,支持定制開發(fā)。
滿足各種研究環(huán)境:一是真實駕駛環(huán)境研究,系統(tǒng)提供改裝車輛及外部交通數(shù)據(jù)采集設(shè)備,實現(xiàn)真正的“人-車-路”數(shù)據(jù)協(xié)同;二是系統(tǒng)支持駕駛模擬環(huán)境下的駕駛?cè)艘驕y試,提供駕駛模擬方案,包括模擬駕駛艙、視景投影和交通場景與物理照明仿真,實現(xiàn)“駕駛模擬”一站式解決方案。 完整的云項目管理及研究流程:系統(tǒng)包含云項目管理、云實驗設(shè)計、同步記錄、數(shù)據(jù)回放、信號處理與統(tǒng)計分析,涵蓋整個研究流程,滿足各種課題項目。 科學(xué)的信號處理與數(shù)據(jù)統(tǒng)計:包含車輛分析、駕駛?cè)藸顟B(tài)識別、時空分析、生理分析、眼動分析、行為分析等,輸出完整的數(shù)據(jù)統(tǒng)計與可視化報告。多模態(tài)數(shù)據(jù)同步采集與分析:支持實時同步與事后同步,包含車輛數(shù)據(jù)、道路與環(huán)境數(shù)據(jù)、生理、眼動、腦電、動作捕捉、行為觀察與面部表情等數(shù)據(jù)。開放式設(shè)備接口與數(shù)據(jù)兼容:系統(tǒng)通過SDK/API/TTL等廣泛的數(shù)據(jù)接口進行第三方設(shè)備或者數(shù)據(jù)同步,同時可以直接導(dǎo)入外部數(shù)據(jù),與系統(tǒng)內(nèi)數(shù)據(jù)進行同步分析,支持定制開發(fā)。駕駛行為分析
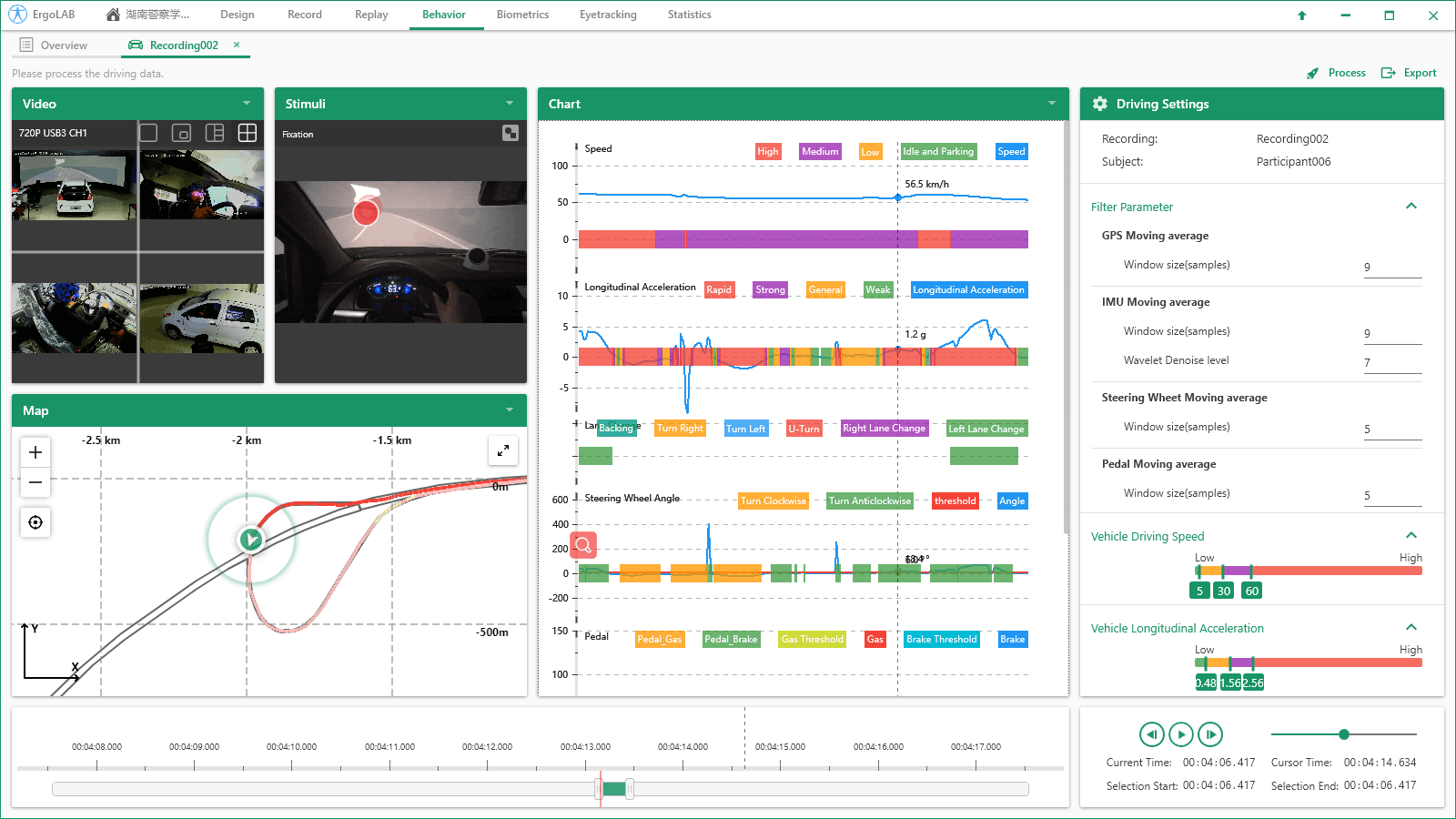
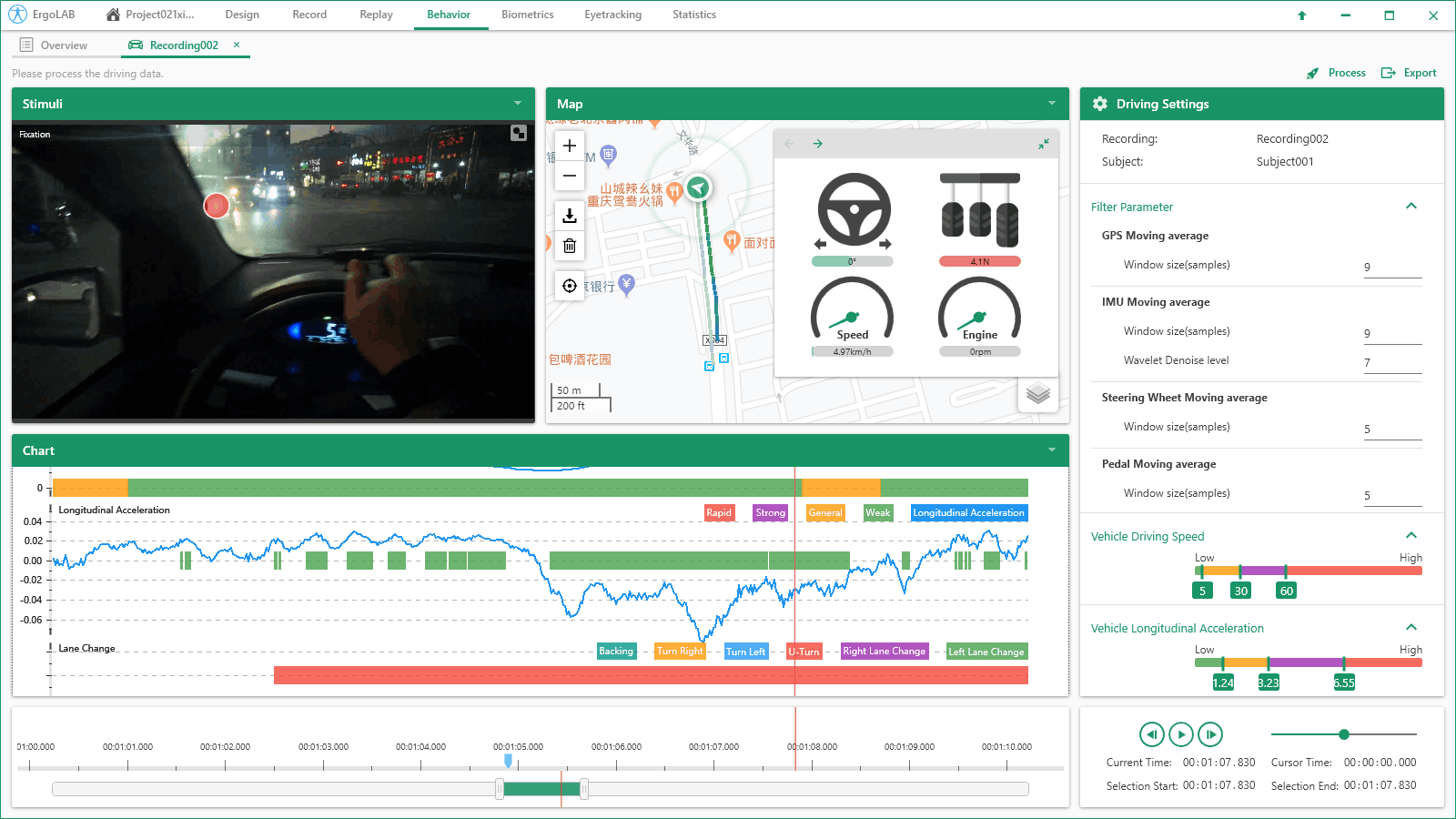
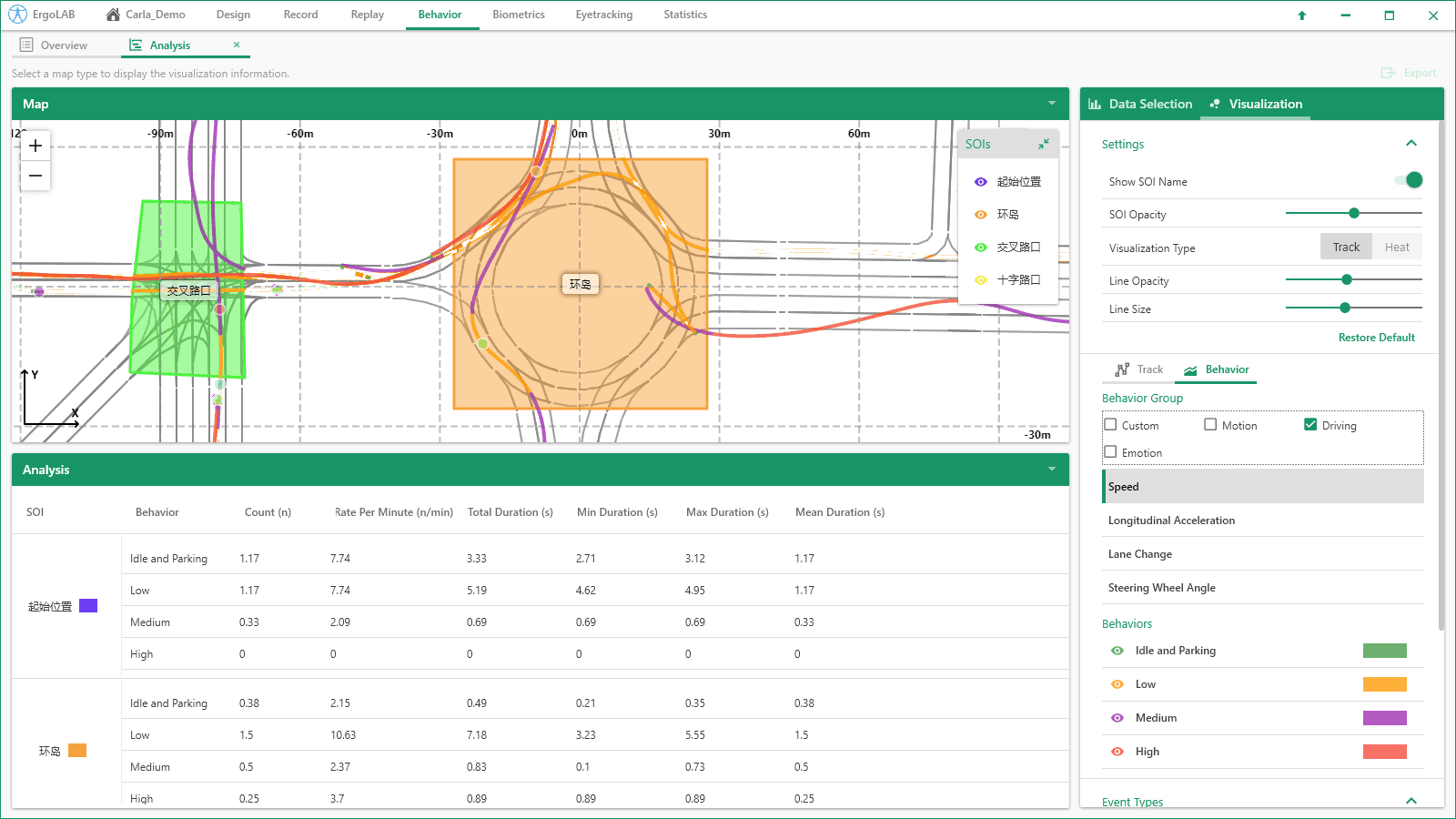
駕駛行為自動編碼:根據(jù)多維數(shù)據(jù)綜合算法模型,實現(xiàn)駕駛行為的自動識別,包括腳踏板行為(剎車、油門)、轉(zhuǎn)向行為(左轉(zhuǎn)、右轉(zhuǎn))、換道行為(左換道、右換道、倒車、掉頭)以及駕駛速度(低速、中速、高速)與加速度行為等,系統(tǒng)進行實時自動編碼與行為數(shù)據(jù)統(tǒng)計。特定駕駛行為檢測:包括魯莽駕駛,超車換道,接打電話,跟車行為以及不同的駕駛風(fēng)格識別等。同步分析不同的駕駛行為與客觀身體數(shù)據(jù)反應(yīng)的相關(guān)或因果關(guān)系。駕駛行為時空分析:自動編碼的所有駕駛行為數(shù)據(jù)均可進入時空分析模塊進行可視化時空熱圖分析,支持多被試的綜合數(shù)據(jù)統(tǒng)計及駕駛行為預(yù)測。駕駛狀態(tài)識別
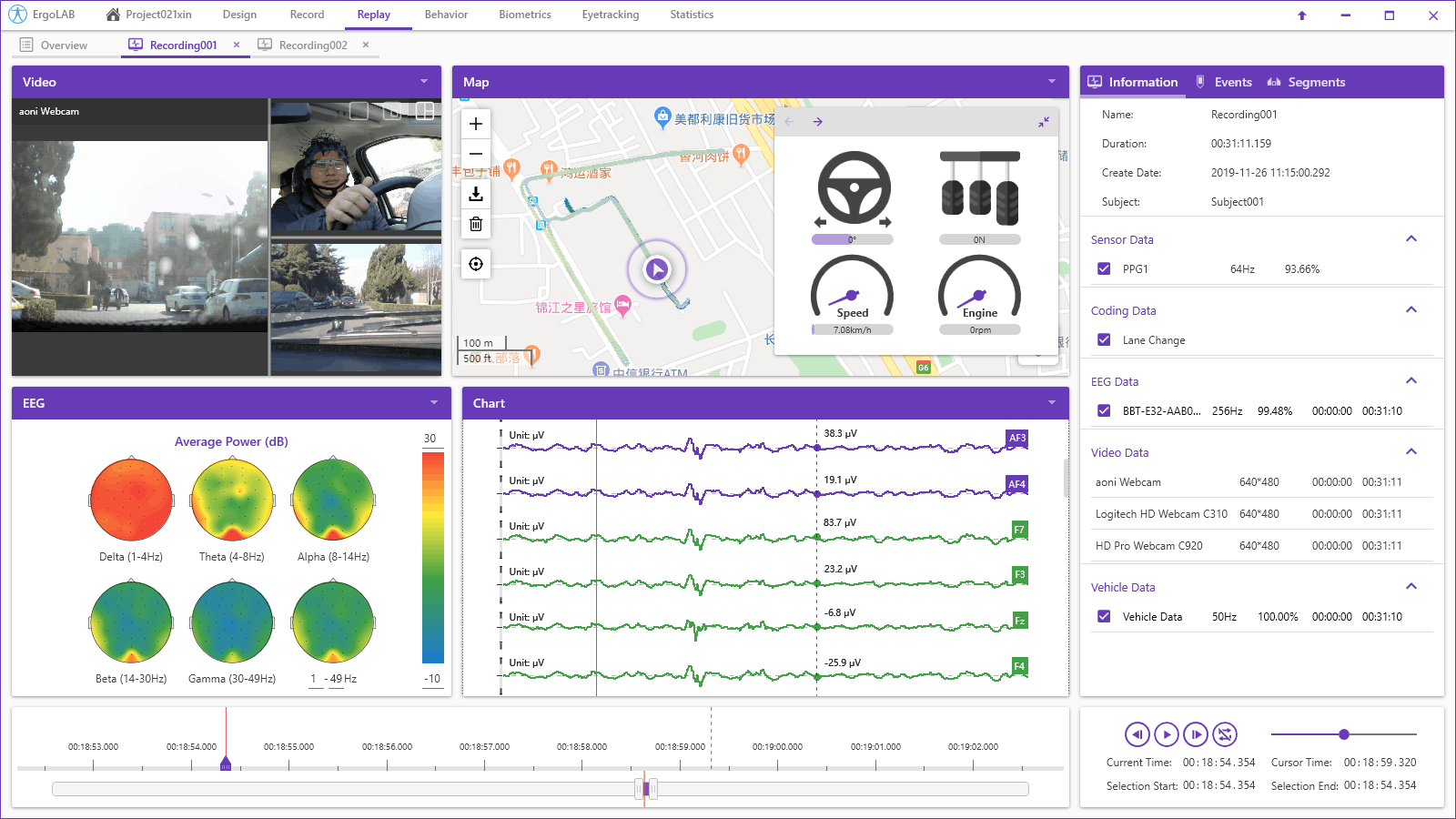
駕駛?cè)藸顟B(tài)識別:系統(tǒng)結(jié)合深度學(xué)習(xí)技術(shù)和傳統(tǒng)機器視覺技術(shù)相融合,支持多神經(jīng)網(wǎng)絡(luò)同時運行,包括人臉檢測、面部特征點檢測、眼部狀態(tài)檢測、頭部姿態(tài)三軸估計、視線矢量估計、人臉特征矢量提取與特定行為檢測等。實時監(jiān)測駕駛?cè)说纳矸葑R別(人臉識別、活體檢測)、疲勞檢測(閉眼、打哈欠)、注意力分散檢測(左顧右盼、低頭抬頭)、特定行為檢測(抽煙、打電話)、視線追蹤、表情識別等功能。駕駛?cè)饲榫w識別:系統(tǒng)通過同步采集面部表情以及多個數(shù)據(jù)源,同步觀察和分析所選擇時間點或時間段內(nèi)所有數(shù)據(jù)流之間的相關(guān)關(guān)系,包括心電數(shù)據(jù)、皮電數(shù)據(jù)、呼吸數(shù)據(jù)、腦電數(shù)據(jù)、瞳孔數(shù)據(jù)等,實時監(jiān)測駕駛?cè)说那榫w反應(yīng)與認知狀態(tài),包括緊張、憤怒、認知負荷、疲勞程度等。車輛基礎(chǔ)數(shù)據(jù)分析
精確的車輛數(shù)據(jù)預(yù)處理模塊,針對行駛軌跡、航向角、橫擺角速度、縱向加速度等GPS與IMU數(shù)據(jù)進行滑動均值處理、小波降噪處理等。的衍生指標(biāo)求解:分析方向盤轉(zhuǎn)動角速度、瞬時轉(zhuǎn)向半徑、道路坡度、側(cè)向速度、側(cè)向加速度、質(zhì)心側(cè)偏角與輪胎滑移率等。行駛穩(wěn)定性分析:包括Beta與R構(gòu)成的穩(wěn)定閾、側(cè)向加速度變化范圍、質(zhì)心側(cè)偏角約束、摩擦圓約束、輪胎側(cè)偏角分析等行車穩(wěn)定性分析。車輛運行狀態(tài)分析
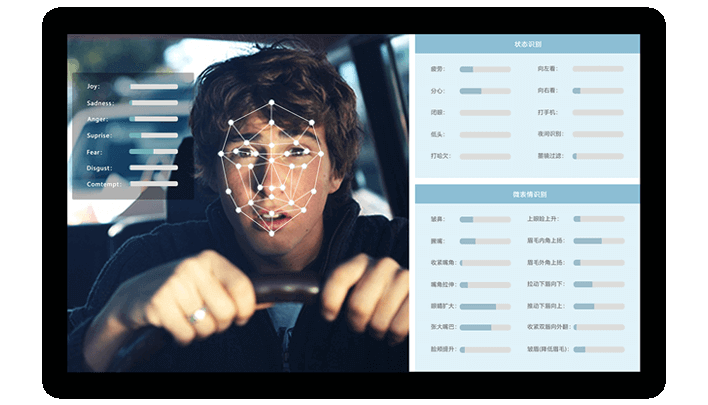
車輛行駛速度分析:平均行駛速度,最高行駛速度,速度分段統(tǒng)計,包括停車、低速、中速、高速,并以可視化圖形展示。縱向加速度分析:縱向加速度分段情況,包括弱加減速、一般加減速、強加減速以及急加減速,統(tǒng)計對應(yīng)運行狀態(tài)發(fā)生次數(shù)與時刻。側(cè)向加速度分析:側(cè)向加速度>0,35g的情況,路段最大側(cè)向加速度以及發(fā)生時刻、發(fā)生次數(shù)等數(shù)據(jù)統(tǒng)計。換道行為分析:包括換道標(biāo)識,方向盤轉(zhuǎn)角,換道參數(shù)統(tǒng)計等數(shù)據(jù),包括平均換道速度、持續(xù)時間、換道速度波動等。汽車測試:綜合計算多種數(shù)據(jù)源進行汽車基本性能的測試分析、汽車穩(wěn)定性測試分析、加速度測試分析以及方向盤、腳踏板等測試。ErgoLAB人機環(huán)境同步云平臺可人-機-環(huán)境多維度數(shù)據(jù)的同步采集與綜合分析,包括眼動追蹤、生理測量、生物力學(xué)、腦電、腦成像、行為、人機交互、動作姿態(tài)、面部表情、主觀評 價、時空行為、模擬器、物理環(huán)境等,為科學(xué)研究及應(yīng)用提供完整的數(shù)據(jù)指標(biāo)。平臺可完成完整的實驗和測評流程,包括項目管理-試驗設(shè)計-同步采集-信號處理-數(shù)據(jù)分析-人工智能應(yīng)用-可視化報告,支持基于云架構(gòu)技術(shù)的團體測試和大數(shù)據(jù)云管理。