



ErgoVR駕駛行為與智能座艙虛擬現(xiàn)實(shí)實(shí)驗(yàn)室是北京津發(fā)科技股份有限公司基于“人-車-路環(huán)境”和“人-信息-物理”系統(tǒng)理論,自主創(chuàng)新配置的針對(duì)交通駕駛與智能座艙領(lǐng)域的科學(xué)性智能座艙虛擬現(xiàn)實(shí)測(cè)評(píng)研究方案。方案以ErgoLAB人車路環(huán)境同步云平臺(tái)為核心,并結(jié)合先進(jìn)的3D虛擬現(xiàn)實(shí)仿真技術(shù),通過(guò)實(shí)時(shí)同步采集人、車輛以及道路環(huán)境的數(shù)據(jù),分析不同環(huán)境、不同任務(wù)下駕駛員及乘員的駕駛行為、認(rèn)知負(fù)荷、情緒喚醒、疲勞性、舒適度等情況,以完成對(duì)駕駛行為、以及座艙設(shè)計(jì)、HMI設(shè)計(jì)、智能系統(tǒng)設(shè)計(jì)、交互方式等的設(shè)計(jì)評(píng)估與優(yōu)化。

ErgoVR駕駛行為與智能座艙虛擬現(xiàn)實(shí)實(shí)驗(yàn)室由虛擬現(xiàn)實(shí)仿真系統(tǒng)、ErgoVR人因分析引擎、人車路環(huán)境多維度數(shù)據(jù)同步采集系統(tǒng)、人車路環(huán)境多維度數(shù)據(jù)分析與人工智能應(yīng)用平臺(tái)等部分組成。人車路環(huán)境多維度數(shù)據(jù)同步采集系統(tǒng)包括ErgoLAB人車路環(huán)境同步云平臺(tái)、生理記錄系統(tǒng)、腦電測(cè)量系統(tǒng)、眼動(dòng)追蹤系統(tǒng)、近紅外腦成像系統(tǒng)、生物力學(xué)測(cè)量系統(tǒng)、動(dòng)作捕捉系統(tǒng)、時(shí)空行為采集系統(tǒng)、人體振動(dòng)工效學(xué)分析系統(tǒng)、物理環(huán)境測(cè)試系統(tǒng)等。人車路環(huán)境多維度數(shù)據(jù)同步分析系統(tǒng)與人工智能應(yīng)用平臺(tái)包括ErgoLAB人機(jī)工程分析系統(tǒng)、時(shí)空行為分析系統(tǒng)、交互行為分析系統(tǒng)、動(dòng)作姿態(tài)工效學(xué)分析系統(tǒng)、EEG腦電分析模塊、眼動(dòng)高級(jí)分析模塊、行為觀察分析模塊、面部表情追蹤與分析模塊、HRV心率變異性分析模塊、EDA皮電反應(yīng)分析模塊、EMG肌電分析模塊、RESP呼吸分析模塊、General通用信號(hào)分析模塊等。
ErgoVR人因分析引擎,可直接對(duì)接智能座艙虛擬現(xiàn)實(shí)原型,直接讀取原型源代碼,自動(dòng)識(shí)別原型各部分組件,完整保留參與者與原型間交互數(shù)據(jù),可用于針對(duì)智能座艙HMI設(shè)計(jì)、駕駛行為研究等方向。

適應(yīng)未來(lái)座艙智能化趨勢(shì),可將語(yǔ)音、手勢(shì)、眼控、情感、腦機(jī)等新型交互方式集成在虛擬現(xiàn)實(shí)駕駛環(huán)境中,并完成對(duì)于多模態(tài)人機(jī)交互方式的測(cè)評(píng)和驗(yàn)證。
采用自主研發(fā)技術(shù),可直接對(duì)接虛擬現(xiàn)實(shí)HMI原型,讀取原型源代碼,基于高保真交互原型進(jìn)行人機(jī)交互數(shù)據(jù)采集與分析,將測(cè)評(píng)結(jié)果快速反饋到設(shè)計(jì)中,實(shí)現(xiàn)HMI設(shè)計(jì)的迭代優(yōu)化。
系統(tǒng)可采集在虛擬現(xiàn)實(shí)環(huán)境中的HMI人機(jī)交互數(shù)據(jù),如手指的點(diǎn)擊、滑動(dòng),語(yǔ)音、手勢(shì)、眼控交互的事件等,并結(jié)合眼動(dòng)、生理、腦電等多維度數(shù)據(jù)進(jìn)行定量化分析,從感知、決策、行為等不同階段對(duì)HMI進(jìn)行測(cè)評(píng)。
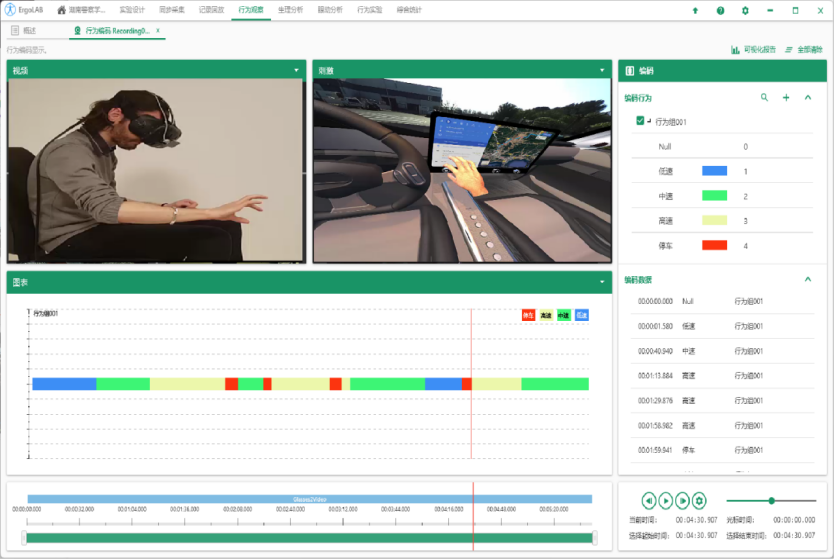
ErgoLAB人機(jī)交互測(cè)評(píng)系統(tǒng)兼容傳統(tǒng)的問(wèn)卷量表等主觀評(píng)價(jià)方法,并將主觀評(píng)估結(jié)果與眼動(dòng)、生理、腦電、行為、交互、動(dòng)作姿態(tài)等客觀數(shù)據(jù)同步,提供了全面的數(shù)據(jù)指標(biāo)體系。
可實(shí)現(xiàn)人、機(jī)、環(huán)境數(shù)據(jù)的實(shí)時(shí)同步采集與數(shù)據(jù)可視化,客觀定量化分析人-機(jī)-路-環(huán)境的交互影響機(jī)理及其內(nèi)在因果關(guān)系。
ErgoLAB人機(jī)交互測(cè)評(píng)系統(tǒng)針對(duì)多維度數(shù)據(jù)源開發(fā)有專業(yè)的信號(hào)處理與數(shù)據(jù)分析模塊,實(shí)現(xiàn)數(shù)據(jù)的一鍵式批量化處理,并可結(jié)合機(jī)器學(xué)習(xí)算法實(shí)現(xiàn)人員的狀態(tài)識(shí)別。













































